本文从MIT的线代教程的角度重新学习线性代数。
这是第一部分,从 L01 到 L13。

前置定义
线性组合(Linear combination)是线性代数中具有如下形式的表达式。其中$v_i$为任意类型的项,$a_{i}$为标量。这些标量称为线性组合的系数或权。
$$
w=a_{1}v_{1}+a_{2}v_{2}+a_{3}v_{3}+\cdots +a_{n}v_{n}
$$
L01 方程组的几何解释
以下面的方程进行讨论
$$
\begin{equation}
\begin{bmatrix}
2 & -1 \\
-1 & 2 \\
\end{bmatrix}
\begin{bmatrix}
x \\
y \\
\end{bmatrix}
=
\begin{bmatrix}
0 \\
3 \\
\end{bmatrix}
\end{equation}
$$
首先可以从行向量的角度来看待,它是平面内两条线的交点。
同时还可以从列向量的角度来看待,如何对两个列向量进行线性组合,从而得到右边的向量。
$$
\begin{equation}
x
\begin{bmatrix}
2 \\
-1 \\
\end{bmatrix}
+
y
\begin{bmatrix}
-1 \\
2 \\
\end{bmatrix}
=
\begin{bmatrix}
0 \\
3 \\
\end{bmatrix}
\end{equation}
$$
考察方程$Ax=b$,对于任意的 b 它是否有解,等价于所有列的线性组合能否填满整个空间。
L02 矩阵消元
考虑下面的方程
$$
\begin{equation}
\begin{bmatrix}
1&2&1 \\
3&8&1 \\
0&4&1 \\
\end{bmatrix}
x
=
\begin{bmatrix}
2 \\
12 \\
2 \\
\end{bmatrix}
\end{equation}
$$
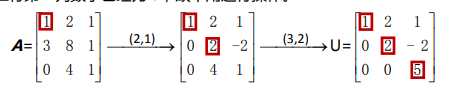
首先消元,做成上三角矩阵$U$。方法就是首先选定first pivot主元,位于第一行第一列的1,第一步要通过消元将第一列中除了主元之外的数字均变化为 0。操作方法就是用之后的每一行减去第一行的适当倍数。所以操作完之后,矩阵变成
$$
\begin{bmatrix}
1 & … \\
0 & …\\
0 & …\\
\end{bmatrix}
$$
然后,对第二列做类似的操作。可以看出,我们是对列求各个主元的。做完之后,会得到一个上三角矩阵。
这里注意几点:
- 如果主元是0,就换行,也就是要主元在对角线上。
- 如果通过换行不能得到三个主元,那么这个矩阵就是坏的。
这里的坏,指的是不可逆。比如类似
$$
\begin{bmatrix}
*&*&* \\
0&*&* \\
0&0&0 \\
\end{bmatrix}
$$ - 如果找不到1作为主元,也可以通过做上面的减法得到1,不过其实主元列是不是1并不重要。因为始终可以通过某行乘以某非零常数进行初等变换。
特别地,行列式是所有主元元素的乘积,不过这个我听课的时候没听到。
下面通过增广矩阵(augment matrix),将 $Ax=b$ 变成 $Ux=c$。
然后是回代,先算出 z,再回带算出 y 和 x。
定义$E_{21}$表示能够对位置(2, 1)进行消元的矩阵,它应该是如下的形式。可以计算 $ E_{21} A $ 检验是不是等于上图的第二个矩阵。
$$
\begin{equation}
\begin{bmatrix}
1&0&0\\
-3&1&0 \\
0&0&1 \\
\end{bmatrix}
\end{equation}
$$
同理,还有$E_{32}$,那么就能够构成整个消元的过程,容易看到,变换是满足结合律的
$$
U = (E_{32} (E_{21} A))
$$
可以组合起来得到
$$
U = E A
$$
这些$E_{xy}$是一个**初等矩阵(Elementary Matrix)**。什么是初等矩阵呢?它是一个和单位矩阵很接近的矩阵,表示由单位矩阵从一次初等变换得来的矩阵。
这里要区分初等矩阵和初等变换的概念,初等变换指的是:
- 交换某两行
- 某行乘以非零常数
- 把第 i 行加上第 j 行的 m 倍
这是一个三角矩阵,其中第 i 行 j 列的元素为 m。这里维基百科中文还写错了。
这里提前介绍了一点置换矩阵(permutation)。左乘表示行变换,右乘表示列变换。因此我们常常看到有$x^T A x$这样的变换方式,这种实际上是二次型,对行和列都会进行变换。
$$
\begin{equation}
\begin{bmatrix}
0&1 \\
1&0 \\
\end{bmatrix}
\begin{bmatrix}
a&b \\
c&d \\
\end{bmatrix}
=
\begin{bmatrix}
c&d \\
a&b \\
\end{bmatrix}
\end{equation}
$$
$$
\begin{equation}
\begin{bmatrix}
a&b \\
c&d \\
\end{bmatrix}
\begin{bmatrix}
0&1 \\
1&0 \\
\end{bmatrix}
=
\begin{bmatrix}
b&c \\
d&a \\
\end{bmatrix}
\end{equation}
$$
L03 矩阵乘法和逆矩阵
本章首先提出了矩阵乘法的五种看待方法,考虑矩阵乘法$A B = C$,其大小分别为$(m \times n) \times (n \times p) = (m \times p)$。
$$
A =
\begin{equation}
\begin{bmatrix}
1&3 \\
2&7 \\
\end{bmatrix}
\end{equation}
$$
第一种方法是最传统的,左边的行乘上右边的列,得到的是一个点。
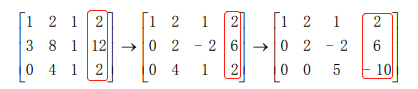
第二种方法看做左边的矩阵,分别去乘上右边矩阵的每一列,这样得到$p$个列向量,然后把它们拼起来就能得到$C$。
而每一列的值如下所示。也就是 AB 的第 p 列只和 B 的第 p 列有关,和 B 的其他列无关。B 的第 p 列的每个行元素,表示 A 的对应列的权重。然后这些列按照这个权重加起来。
容易看出,如果 B 的第 p 列中只有第 i 列为1,其他都为0,就相当于选择了 A 的第 i 列作为 AB 的第 i 列。
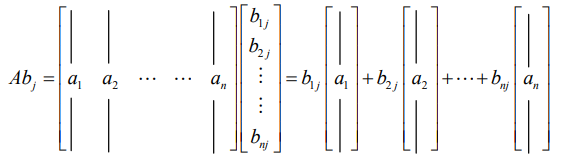
第三种方法看做左边的矩阵的每一行,分别去乘上右边矩阵,这样得到$m$个行向量,然后把它们拼起来就能得到$C$。
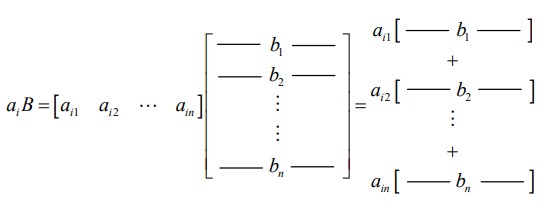
第四种方法看做左边的矩阵的每一列,分别去乘上右边矩阵对应的行,得到$n$个矩阵,然后将它们对应位置加起来就能得到$C$。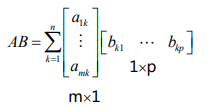
这一种方法,对于左边是由1和0组成的矩阵有特别的效果,就好像我在 pick 列一样。
$$
\begin{equation}
\begin{bmatrix}
a&b \\
c&d \\
\end{bmatrix}
\begin{bmatrix}
1 \\
0 \\
\end{bmatrix}
=
\begin{bmatrix}
a \\
c \\
\end{bmatrix}
\end{equation}
$$
第五种方法是分块矩阵。
对于方阵而言,左逆等于右逆$A^{-1} A = I = A A^{-1}$。
对于非方阵,则不然。毕竟连形状都不同了。
可逆矩阵又称为非奇异(non singular)矩阵。这里的奇异其实在一些场景中被翻译为“单”。
假设 A 乘上一个 B 可以得到单位矩阵 I,但实际找不到这样的 B。
$$
A =
\begin{equation}
\begin{bmatrix}
1&3 \\
2&6 \\
\end{bmatrix}
\end{equation}
$$
可以用矩阵的第二种乘法形式来理解,单看 $ [x , y]^T $那一列。
$$
\begin{equation}
\begin{bmatrix}
1&3 \\
2&6 \\
\end{bmatrix}
\begin{bmatrix}
x&* \\
y&* \\
\end{bmatrix}
\end{equation}
=
\begin{bmatrix}
1&0 \\
0&1 \\
\end{bmatrix}
$$
可以从线性空间角度理解,组成 A 的两个列向量构成一条直线,但 $ [1 , 0]^T $ 单位矩阵的第一列就不在这条直线上。
还可以从方程的角度理解。如果 A 不可逆,那么 $Ax = 0$ 存在非零解 $x$。
另外,在之前介绍消元的时候讲到过,如果出现全零行,那么矩阵不可逆。
高斯若尔当消元法求逆矩阵。
L04 LU分解
逆矩阵的特性,这个只要注意到$AA^{-1}=I$就可以了,教授用了一个经典的比喻,就是穿衣服先穿里面的,再穿外面的;那么脱衣服也要先脱里面的,再脱外面的。
$$
(AB)^{-1} = B^{-1}A^{-1}
$$
证明如下,然后用结合律就行了
$$
(AB) B^{-1} A^{-1}
$$
这其实反映了把矩阵作为变换的一种角度的思考。
转置的操作,相当于沿着主对角线翻转。
类似于逆,还有
$$
(AB)^T = B^T A^T
$$
这个证明不如矩阵的逆直观,因为转置没有 $AA^{-1}=I$ 这样的定义。不过可以通过下图来看。![]()
另外一个性质是
$$
(A^T)^{-1} = (A^{-1})^{T}
$$
证明是
$$
(AA^{-1})^{T} = (A^{-1})^T A^T = I
$$
关于逆和转置的性质,可以进一步从范畴论上来描述,但我目前还没怎么看懂。
LU 分解将一个矩阵分解为一个下三角矩阵L和一个上三角矩阵U的乘积。其中 L 的主对角线是 1,U 的主对角线未必是1。
$$
A = L U
$$
有时需要让主元出现在对角线上,所以要交换原矩阵的一些行,所以要再乘上一个置换矩阵P,称为PLU分解。
因为
$$
E_{32} E_{31} E_{21} A = U
$$
所以
$$
A = E_{21}^{-1} E_{31}^{-1} E_{32}^{-1} U
$$
LU 分解的意义是什么呢?我觉得应该是好算。从下图中教授的示例中可以看到,在计算 $ E_{21}^{-1} E_{32}^{-1} $ 时,下面一行的逆矩阵相乘互不干扰,所以基本上不需要计算就能得出来。而上一行的原矩阵则会干扰,比如会出现 10 这样奇怪的数字。这也是为什么要求逆的原因,这样可以快速得到 L。
用教授的话来说,只要把消元乘数填进来就得到 L,和 A 没有关系。这相比我们用消元的方法得到 L,显得非常优美。
后面教授还进一步计算了下消元的复杂度,是 $O(n^3/3) 的$。
L05 转置与向量空间
置换矩阵$P$是对行重排的$I$,共有$n!$种。实际上它们对应置换群。
置换矩阵具有性质$P^{-1} = P^T$
这个性质可以从下面的图中获得直觉。可以发现 P 的第 i 行和 $ P^{-1} $的第 i 列相乘会得到1,和其他列相乘都是0。
![]()
以 $i = 1$ 为例,$ P^{-1} $ 的第一列必然是
$$
\begin{equation}
\begin{bmatrix}
0 \\
0 \\
1 \\
\end{bmatrix}
\end{equation}
$$
而它也恰恰是 P 的第 i 行的转置。
对称矩阵定义是$A^T = A$,容易得到$R^T R$是对称的,证明就是用 $(AB)^T = B^T A^T$。
vector space 表示向量空间,它需要对加法和数乘封闭。
subspace 表示子空间。0向量一定在子空间里面,因为任何一个向量和0数乘都是0向量,而向量空间要对数乘封闭。或者从群论的角度,子群一定包含单位元。
两个子空间的交集一定是子空间,可以想象三维空间里面的一条线是一个子空间,那么两条线的交点一定也在这个三维空间里面。这个实际上是子群的性质。
比如下面我们证明对加法封闭:
$$
x \in U \wedge x \in V \\
y \in U \wedge y \in V \\
x + y \in U \\
x + y \in V \\
x + y \in (U \cap V) \\
$$
两个子空间的并集不一定是子空间,可以想象用两个向量做加法可以张成一个平面,但平面上的向量并不都在两个向量上面。
column space 表示列空间。列空间是由矩阵$A$的所有列向量生成的$R^m$上的子空间,记作 $C(A)$ 。例如下面的矩阵 $A$,实际上它 $ R^3 $ 中两个向量张成的平面。
$$
\begin{equation}
\begin{bmatrix}
1&3 \\
2&3 \\
4&1 \\
\end{bmatrix}
\end{equation}
$$
L06 列空间和零空间
可以从第 12 分钟开始看。
矩阵 $A$ 的列空间 $C(A)$ 中的所有向量,都为 $R^m$ 上的向量,即 $m$ 维向量。
列空间中的所有向量均为矩阵 $A$ 中列向量的线性组合。在后面线性相关性的讨论中,我们会将列向量组合成矩阵。
注意,后面的课程往往会和线性方程结合起来,列空间实际上是方程 $Ax = b$ 里面的解 $x$。但要注意,列空间的定义实际上是列向量的线性组合。
下面,将列空间和线性方程结合起来看。列空间用来描述 $Ax = b$ 这个方程的解 $x$。
考虑矩阵
$$
A =
\begin{equation}
\begin{bmatrix}
1&1&2 \\
2&1&3 \\
3&1&4 \\
4&1&5 \\
\end{bmatrix}
\end{equation}
$$
那么,什么情况下方程 $Ax = b$ 有解呢?当 $b$ 在 $A$ 的列空间中时,这个方程有解。原因很显然,列空间包含所有 $ Ax $ 能得到的向量。
所以其实列空间有两个描述,它既是列向量组成的空间,又是某个方程的解。
下面引入了线性相关的概念。对于上面的矩阵 A 中的三个列向量,有没有“滥竽充数”的呢?或者说如果是否可以去掉一个列向量,但是可以得到相同的列空间呢?答案显然,列3是列1和列2相加。我们称列3和列1列2线性相关。因此实际上 A 的列空间是 $R^4$ 上的一个二维空间。
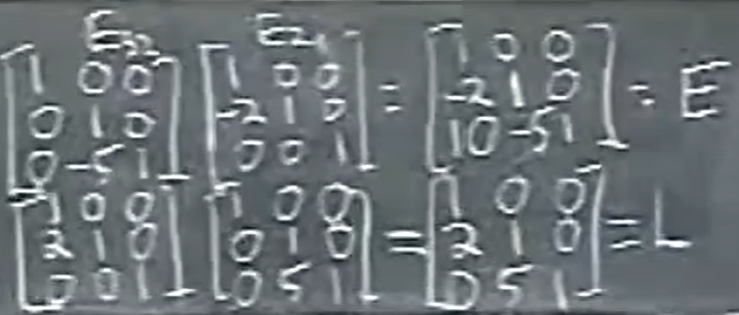
null space 表示零空间。主要用来描述 $Ax = 0$ 这个方程的解。
同样举上面的例子,因为 x 是三维向量,所以零空间是 $R^3$ 的子空间。
我们能口算得到 $ [1 \,1 \, -1]^T $ 是一个解:
- 用左边矩阵的每一列,乘以右边矩阵的每一行
- 看成 x 的每个分量,分别数乘 A 的每一列
同样 $[n \, n \, -n]^T$ 都是解。这实际上是一条直线。
可以看到零空间中也存在线性相关的问题。
下面,教授证明了 $Ax$ 是向量空间,也就是证明如果 $ A(v) = 0, A(w) = 0$,则 $A(v+w) = 0, aA(v) = 0$。因为矩阵乘法对矩阵加法可分配。
【Q】因为0向量是单位元,看起来它很像是群论里面的 Ker 即核的概念。
现在我们回到列空间 $ Ax = b $,尝试求出它的所有解。比如我们令 b 为 $ [1 , 2 , 3 , 4]^T$
不妨先思考下,这些所有解是否构成向量空间了呢?那就不一定了。要看解里面是否包含0。
L07 计算 Ax = 0
在下面的例子中将 $Ax$ 转化为了 $Ux$。因为 $A$ 不是方阵,所以需要用消元法而不能使用 LU 分解。得到的是类似下面的阶梯(echelon)矩阵的形式。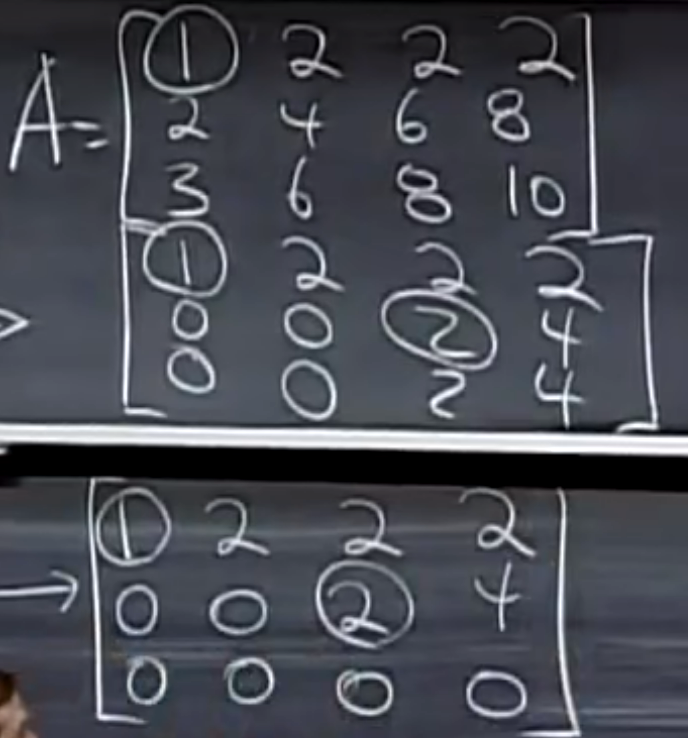
A 的主元(pivot)数量为 2,称为矩阵的秩(rank)。在这里可能产生困惑,因为之前只操作过方阵的主元。其实主元的定义是做行消元时某一行的第一个非零元。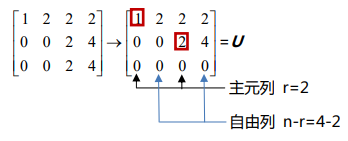
包含主元的列是主元列,否则是自由列。那么实际上可以给自由列上赋任意的值,然后求解主元列。例如,一般给其中一个自由列赋1,其他的赋0,能够得到如下两个特解。
$$
x_1 =
\begin{equation}
\begin{bmatrix}
-2 \\
1 \\
0 \\
0 \\
\end{bmatrix}
\quad
x_2 =
\begin{bmatrix}
-2 \\
0 \\
-2 \\
1 \\
\end{bmatrix}
\end{equation}
$$
【Q】能不能两个都赋值0?那一定得到0向量,0向量在任何子空间中,所以没啥意义。
通过特解可以构造出整个零空间。
$$
x = c x_1 + d x_2
$$
到这里可以理解秩的一个意义,令列 $ n = 4 $,秩 $ r = 2 $,说明只有两个方程起作用。
简化行阶梯形式(Reduced row echelon form)。也就是
- 让每个主元上方和下方都是0。
- 让主元变为1。
matlab 中通过 rref 指令可以得到简化行阶梯形式。
从下图中可以看到,简化行阶梯形式中可以找到单位矩阵 I 这样的构造。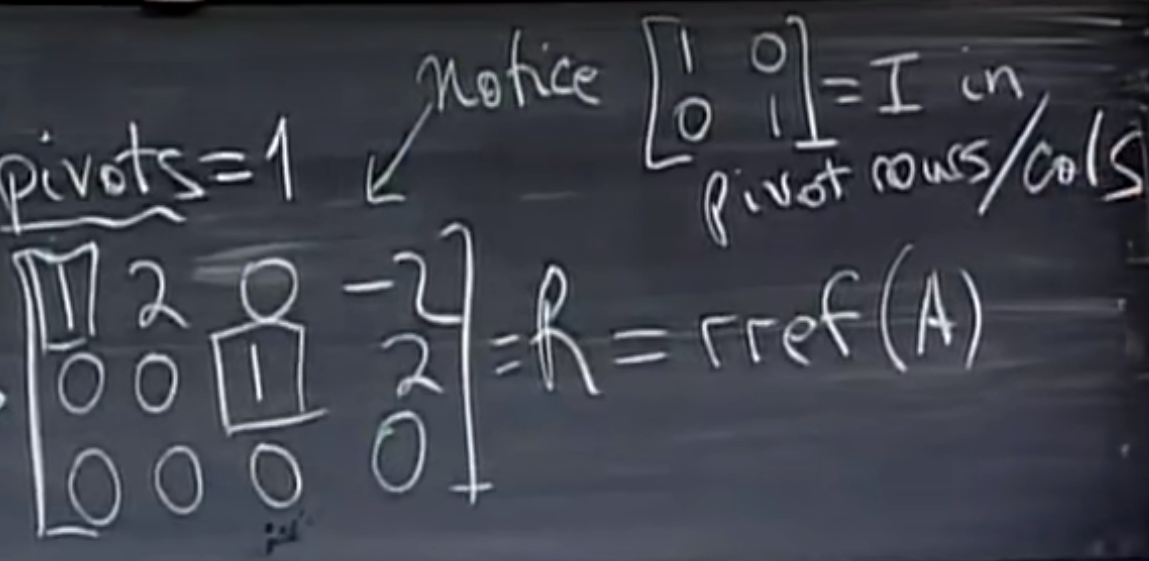
甚至可以将矩阵分为主元部分和自由部分。主元部分实际上就是 I。而自由部分未必是个方阵。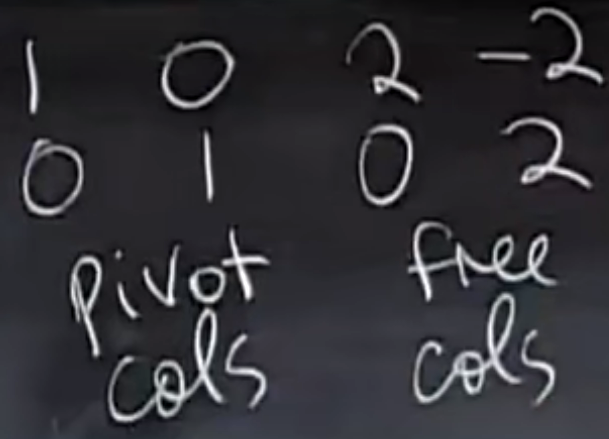
或者写成
$$
\begin{bmatrix}
I&F \\
0&0 \\
\end{bmatrix}
$$
观察上图,可以发现它和特解 $x_1$ 和 $x_2$ 有着对应的关系。主元部分 $I$ 相等,但自由部分 $F$ 相当于是取了两个特解的相反数。于是可以从特解直接构造出简化行阶梯形式(只要特解是按照一个自由列赋1,其他所有赋0来做的,不然得不到 $I$ 啊)。不过为什么是相反数呢?它是怎么来的呢?
现在先考虑构建一个零空间矩阵 $N$,它的各列由特解组成,显然我们希望
$$
RN = 0
$$
观察发现下面的 $N$ 满足条件,其中 $I$ 对应矩阵 $R$ 自由变量部分,$-F$ 对应矩阵 $R$ 主元部分。
$$
N =
\begin{equation}
\begin{bmatrix}
-F \\
I \\
\end{bmatrix}
\end{equation}
$$
如下图所示,$U$ 是一个“上三角”矩阵,它得到的 $R$ 是图中第二个矩阵。
那么 $RN$ 应该是0,我们不妨乘起来看看,也就是红色和红色乘,绿色和绿色乘。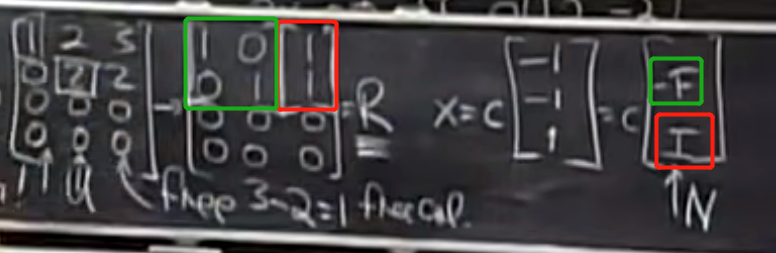
L08 计算 Ax = b
增广矩阵(augmented matrix)。
$$
\begin{equation}
\begin{bmatrix}
1&2&2&2&b_1 \\
2&4&6&8&b_2 \\
3&6&8&10&b_3 \\
\end{bmatrix}
\iff
\begin{bmatrix}
1&2&2&2&b_1 \\
0&0&2&4&b_2-2b_1 \\
0&0&0&0&b_3-b_2-b_1 \\
\end{bmatrix}
\end{equation}
$$
有解的条件是 $ b_3-b_2-b_1 = 0 $。
首先讨论可解性。从向量空间的角度,$ Ax = b $可解的条件是当 $b$ 在 $C(A)$ 中。
所以,如果 $A$ 中的一些行是0,那么对应的 $b$ 也应该是 0。
然后找特解。相比零空间,这里只需要将所有自由变量设为0,解出主变量。其实在 $ Ax = 0 $ 中也可以执行这一步,只是解得0,最后通解的表示上也是加上 $b$,所以没意义。
$$
x_p =
\begin{equation}
\begin{bmatrix}
-2 \\
0 \\
3/2 \\
0 \\
\end{bmatrix}
\end{equation}
$$
然后求通解。这里是通解加上任意对应的零空间 $ Ax = 0 $ 中的解。这很符合直觉,因为如下所示,特解 $x_p$ 加上0,结果还是0
$$
A x_p = b \\
A x_n = 0 \\
A (x_p + x_n) = b
$$
即
$$
x_c =
\begin{equation}
\begin{bmatrix}
-2 \\
0 \\
3/2 \\
0 \\
\end{bmatrix}
+ c
\begin{bmatrix}
-2 \\
1 \\
0 \\
0 \\
\end{bmatrix}
+ d
\begin{bmatrix}
2 \\
0 \\
-2 \\
0 \\
\end{bmatrix}
\end{equation}
$$
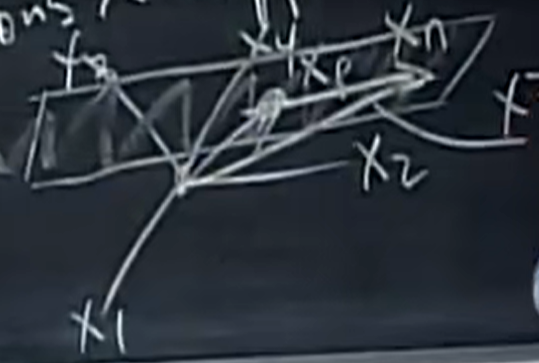
不过为什么这包含了所有的解呢?下面教授展示了四维空间画二维平面的绝技。
设矩阵有 $m$ 行 $n$ 列。
容易看出,矩阵的秩一定小于等于 $m$ 且小于等于 $n$。
先前教授举的例子中,$r$ 都小于 $m$ 且小于 $n$,我们已经发现此时 $ Ax = b $ 无解或者有无穷多的解。
现在考虑列满秩情况,即 $r=n$。此时没有自由变量。$Ax = b$ 的解是0个或者1个。
现在考虑行满秩情况,即 $r=m$。此时消元不会有零行,并且存在一些自由向量。$Ax = b$ 始终有解。
现在考虑满秩的情况,即 $r=n=m$。此时方程有唯一解。
满秩矩阵 $r=n=m$ 经过消元变换,能够得到 $I$。满秩矩阵的列空间为0向量。【Q】总感觉这里能对应一些同态的概念,甚至是单群的概念?
![]()
【Q】其实感觉从这里开始的课程中就始终没有分清楚列秩和行秩。其实有个结论列秩等于行秩,虽然一直没有被提及或者证明。但因为后面都是讲的列向量组,所以一般都是列秩。
L09 线性相关
线性相关(dependence),线性无关(independence)都是对向量组而言的。
什么情况下,向量 $x_1, x_2, …, x_n $ 线性无关呢?在系数不都为零的情况下,如果存在有线性组合为零向量,那么是线性相关的。
即存在下面的情况
$$
c_1 x_1 + c_2 x_2 + … + c_n x_n = 0
$$
零向量和任意向量 v 是相关的,因为能找到
$$
c_1 0 + c_2 v = 0
$$
给定平面上的三个向量,它们一定是线性相关的。如何一眼看出这个结果呢?我们可以将这三个向量 $v_1, v_2, v_3$ 组成一个2行3列的矩阵 $A$。可以发现这个矩阵存在一些自由变量,所以 $ Ax = b, b = 0 $始终有解 $x$。换句话说,在零空间里面,存在非零向量 $x$。
因此可以这样考虑,对于一些向量组成的矩阵 A,如果它的零空间 $Ax = 0$ 中只包含零向量,那么这些向量线性无关。
相反,如果零空间$Ax = 0$中包含除零向量之外的解,那么这些向量线性相关。
从 L03 矩阵乘法和逆矩阵中可以看到,如果 $Ax = 0$ 有非零解,那么A 矩阵不可逆。因此如果列向量们构成可逆矩阵,则线性无关,从而零空间只包含零向量。
这个定义是前几节课中不停考虑列向量的不同组合下,什么时候能等于0,什么时候会等于b。
还可以从秩的角度来看线性相关性。如果线性无关,那么所有的列都是主列。实际上所有的自由列都可以看做是主列的某种组合。
列向量张成(span)向量空间,表示这个空间由所有这些向量的组合构成。
容易想到,是否存在不多不少个列向量,它们既张成空间,但线性无关呢?这些向量称为基(basis)。
这里教授犯了一个错误,他说张成一个三维空间。其实可以发现有两行相同,所以消元一定能得到一个全是0的行,所以这三个向量其实还是线性相关的。实际上它们张成一个平面,没错,$ [3 , 3 , 7]^T $ 和 $ [3 , 3 , 8]^T $ 都在这个平面上。
$$
\begin{equation}
\begin{bmatrix}
1&2&3 \\
1&2&3 \\
2&5&8 \\
\end{bmatrix}
\Rightarrow
\begin{bmatrix}
1&2&3 \\
0&4&5 \\
0&0&0 \\
\end{bmatrix}
\end{equation}
$$
这里教授说,只要方阵可逆,那么就是基。但他没有具体解释,所以这是为什么呢?
- 如果方阵可逆,那么它可以经过一系列初等变换,变为单位矩阵 I
这是因为在 L02 矩阵消元那一章讲过如果矩阵最下面一行都是0,没有主元,那么矩阵是不可逆的。那么可逆的矩阵一定可以经过消元得到一个 U,进而最后得到一个 I。 - 如果方阵可逆,那么表明 $Ax = b$ 有唯一解,从而秩为 $n$。
例:找出下列向量组的一组基
$$
\begin{bmatrix}
1&2&3&1 \\
1&1&2&1 \\
1&2&3&1 \\
\end{bmatrix}
$$
显而易见的是第一列和第二列构成一组基。这样后面两列是自由列。
$$
\begin{bmatrix}
1&2 \\
1&1 \\
1&2 \\
\end{bmatrix}
$$
下面给出定义,列秩是矩阵 $A$ 中主元列的个数,也就是列空间的维度。这里强调的是矩阵 $A$ 的列空间 $C(A)$ 而不是矩阵的维度。所以实际上它联系了矩阵和列空间。
对于上面的矩阵,考虑零空间的基。矩阵 $A$ 的零空间 $ N(A) $ 的维度是自由变量的数量。所以有对于 $m$ 行 $n$ 列矩阵来说,如果秩是 r,则 $n - r$ 是零空间的维度,即自由变量的数量。
L10 四个基本子空间
这节课从教授纠正了上节课的那个错误开始。他说课后的学生说,因为她发现 $A$ 不可逆,所以列向量线性相关。
教授随后说,其实还能发现两个行相等,所以其实只能当做一个行。因此在这里行的性质也反映了列的性质。这也就引入了本节课四个子空间之一的行空间。
设 A 是 m 行 n 列的矩阵。A 的四个子空间分别是:
- 列空间 $C(A)$
列向量的线性组合。方程 $Ax = b$ 的解 $x$ 的集合。
这些空间为什么被叫作子空间呢?之前提到过,列空间指的是 $m$ 个列向量生成的 $R^m$ 上的子空间。 - 零空间 $N(A)$
方程 $Ax = 0$ 的解 $x$ 的集合。
因为包含了 $ Ax = 0 $ 的所有解,而 $x$ 是 $ R^n $ 上的,所以零空间是 $R^n$ 的子空间。 - 行空间 $C(A^T)$
行向量的线性组合。也可以看做 $A^T$ 的列空间。是 $R^n$ 的子空间。 - 左零空间 $N(A^T)$
是 $R^m$ 的子空间。
| 项目 | $C(A)$ | $N(A)$ | $C(A^T)$ | $N(A^T)$ |
|---|---|---|---|---|
| 矩阵的秩/空间的维数 | $r$ | $n-r$ | $r$ | $m-r$ |
| 基 | 主列 | $Ax = 0$ 的特解,或者自由向量 | 前 $r$ 行阶梯型行向量 | $E$ 中和 $R$ 中0行对应的行(看后面讲解) |
下面是对这个表格进行讨论的几个话题。
首先是零空间 $N(A)$ 的基为什么是 $Ax = 0$ 的特解?
教授帮我们回忆,每个特解都是从一组自由列得出的。
这里教授直接讲了行秩等于列秩,所以 $C(A^T)$ 也是 $r$。但他也说了这里缺一个证明,估计是没讲。
$C(A)$ 不等于 $C(R)$,也就是说进行行变换消元之后得到的列空间不同。比如下面的例子中,$[1 , 1 , 1]^T$ 属于 $C(A)$,可显然它不属于 $C(R)$。
$$
\begin{equation}
\begin{bmatrix}
1&2&3&1 \\
1&1&2&1 \\
1&2&3&1 \\
\end{bmatrix}
\rightarrow
\begin{bmatrix}
1&0&1&1 \\
0&1&1&0 \\
1&0&0&0 \\
\end{bmatrix}
\end{equation}
$$
这里我感到有点困惑,看了下 randomwalk 的笔记,他也有类似的困惑。他的解释是,初等矩阵的行变换并不会改变线性相关性。证明也很简单,假设 $A$ 秩为 $r$,则前 $r$ 个列向量线性无关。消元操作实际是 $EA = U$,即 $E [a_1, … a_r] = U$。后面假设线性相关则有 $ c_1 E a_1 + c_2 E a_2 + … + c_r E a_r = 0$。
那么经过行变换得到的列,还在行空间中么?答案是显然的。因为消元是一系列行变换,而行变换可以看做线性组合,显然经过线性组合之后,向量还在同一个行空间里面。
下面教授介绍了如何计算 $N(A^T)$ 的基。他给出了一种非常巧妙的方式。
首先,先介绍左零空间为什么叫左零空间?所以相当于是 $y$ 左乘了 $A$。
$$
A^T y = 0 \Leftrightarrow y^T A = 0
$$
然后切入正题,考虑扩展一下之前的高斯若尔当消元法
$$
rref ([A_{m \times n} \quad I_{m \times m} ]) \Rightarrow [R_{m \times n} \quad E_{m \times m} ]
$$
因为消元法本身只是行变换,所以这个运算是能够进行到最后得到某个 $E$ 的。实际上经过对应的行变换,$E$ 如下所示
$$
\begin{bmatrix}
-1&2&0 \\
1&-1&0 \\
-1&0&1 \\
\end{bmatrix}
$$
现在来考虑 $E$ 的意义。
$$
EA = R
\\
\begin{equation}
\begin{bmatrix}
-1&2&0 \\
1&-1&0 \\
-1&0&1 \\
\end{bmatrix}
\begin{bmatrix}
1&2&3&1 \\
1&1&2&1 \\
1&2&3&1 \\
\end{bmatrix}
=
\begin{bmatrix}
1&0&1&1 \\
0&1&1&0 \\
0&0&0&0 \\
\end{bmatrix}
\end{equation}
$$
教授说,我们看 $R$ 矩阵只有最后一行为0,所以 $E$ 矩阵的最后一行就是 $N(A^T)$ 的基,它确实是1维向量。为什么呢?不妨把这最后一行单独拿出来,根据矩阵乘法的第三个性质,我们可以得到如下的式子
$$
[-1 , 0 , 1] A = [0 , 0 , 0 , 0]
$$
即
$$
x^T A = 0
$$
两边转置一下,就是
$$
A^T x = 0
$$
而这个的解 $x$ 就是零空间。而因为之前教授讲过,零向量的一组特解就是零空间的基。
对于上面表格的讨论到此为止,下面是一些新的内容。
这里教授讲到,其实矩阵本身就可以构成一个向量空间。
比如 3x3 的矩阵,它的子空间是上三角矩阵或者对称矩阵。这两个子空间的交集是对角矩阵。可以直觉写出对角矩阵的基。
$$
\begin{equation}
\begin{bmatrix}
1&0&0 \\
0&0&0 \\
0&0&0 \\
\end{bmatrix}
\begin{bmatrix}
1&0&0 \\
0&3&0 \\
0&0&0 \\
\end{bmatrix}
\begin{bmatrix}
0&0&0 \\
0&0&0 \\
0&0&7 \\
\end{bmatrix}
\end{equation}
$$
L11 矩阵空间和小世界图
对角矩阵构成的子空间 $S$ 维数为6。上三角矩阵构成的子空间 $U$ 维数为6。
介绍矩阵的和,或者叫直和。
考虑矩阵 $S$ 和 $U$,它们的交集是一个空间,但是它们的并集不一定是一个空间,这个之前已经讲过了。定义直和是 $s_i + u_j$,其中 $i$ 和 $j$ 取遍 $S$ 和 $U$ 中所有可能的元素。 它是 $M$ 的子空间。我们实际上有如下类似容斥原理的等式
$$
dim(S) + dim(U = dim(S + U) + dim(S \cap U)
$$
下面的矩阵秩为1。根据矩阵乘法的第四种表示形式,它可以被分解为一个列矩阵乘以一个行矩阵。
$$
\begin{bmatrix}
1&4&5 \\
2&8&10 \\
\end{bmatrix}
$$
一个 5x17 的秩为 4 的矩阵可以被分解为 4 个秩为 1 的矩阵。
设 M 为所有 5x4 的矩阵,求所有由秩为 4 的矩阵构成的子集是子空间么?显然不是,因为0矩阵不在里面。那么如果加进去呢?也不是。因为我们有
$$
dim(S) + dim(U = dim(S + U) + dim(S \cap U)
$$
因此两个秩为4的矩阵加起来的秩未必是4了。
在 $R^4$ 空间中,所有满足 $v_1 + v_2 + v_3 + v_4 = 0$ 的向量构成子空间 S 么?是构成的,因为它肯定是某个矩阵的零空间。这个矩阵秩肯定是1,因为只有一个方程,对应是一个一行的矩阵。
实际上我们可以把矩阵写出来 $ [1, 1, 1, 1]$。
这个矩阵的左零空间维数是 $m - r = 0$,所以特解应该只包含零向量。
对这个一列的矩阵消元,易于发现它的列空间是1,而秩是1,同样可以算出左零空间维数是0。
$$
\begin{equation}
A^T =
\begin{bmatrix}
1 \\
1 \\
1 \\
1 \\
\end{bmatrix}
\end{equation}
$$
L12 网络
这里教授插了一句,零空间的含义就是如何线性组合列向量 $x$,从而得到0。其实也同时解释了 $ Ax = 0 $ 这方程的含义。
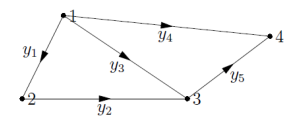
上面的一张电路图,我们可以转成一个关联矩阵(incidence matrices)。其中4列对应4个节点,5行对应5条边。
$$
\begin{bmatrix}
-1&1&0&0 \\
0&-1&1&0 \\
-1&0&1&0 \\
-1&0&0&1 \\
0&0&-1&1 \\
\end{bmatrix}_{5 \times 4}
$$
从矩阵上来说,矩阵的前三行线性相关。教授说这表明 $y_1$、$y_2$、$y_3$三条边在图上构成一个环,看一眼图,确实不错。有环如何导致线性相关呢?这里我觉得可以想象成向量的加法。
现在考虑 $A$ 的零空间。首先 $Ax$ 是什么?是电势差。
那么 A 的基是什么呢?$ [1, 1, 1, 1]^T$ 是一个基,大家电势都相等,Ax 肯定是0。教授说实际上接下来 $dim(N(A)) = 1$,所以基就是那一个。
所以零空间实际上是一维,也就是一条直线。这在物理意义上表示每个点的电势由一个常数决定,但如果我们比如将点4接地,也就是令它的电势为0,那么就可以求出其他的电势。
这里感觉教授直接跳过了列空间,毕竟 $ Ax = b$ 的意义很明显,就是给定电压求电势。
这一段主要讲基尔霍夫定律。
$$
\begin{equation}
A^T=
\begin{bmatrix}
-1&0&-1&-1&0 \\
1&-1&0&0&0 \\
0&1&1&0&-1 \\
0&0&0&1&1 \\
\end{bmatrix}_{4 \times 5}
\end{equation}
$$
不妨看看 $A^T y = 0$ 的物理意义。我们可以列出第一个方程 $-y_1-y_3-y_4=0$,表示点 1 的合电流是 0,也就是流入等于流出。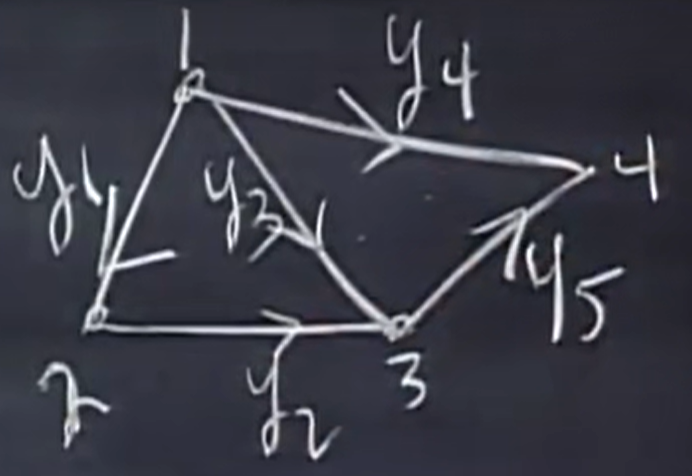
下面求这个零空间的基。因为矩阵的秩是 3,所以要找两个特解。GS 老板肯定又不想消元,而是口算了。他这次的做法是分别令右边和左边回路的电流为0,然后就得到两个特解。当然,我们令 $y_3$ 为0,就可以求出大回路对应的特解。
$$
\begin{equation}
y_1=
\begin{bmatrix}
1 \\
1 \\
-1 \\
0 \\
0 \\
\end{bmatrix}
y_2=
\begin{bmatrix}
0 \\
0 \\
1 \\
-1 \\
1 \\
\end{bmatrix}
\end{equation}
$$
为什么我们选择回路来求特解呢?结合前面的讲解,构成回路的向量是线性相关的。从上面的基 $y_1$ 也能看出,它实际上说明了前三行如何组合得到0。
下面看下 A 的行空间。
首先,哪些列可以是基呢?用先前回路的方法,可以看出 1/2/3 和 3/4/5 分别线性相关。所以教授选了 1/2/4 作为主列。从图中看到,1/2/4 构成的子图没有回路,这也意味着它们线性无关。
进一步,可以得到
$$
|loop| = |edge| - (|nodes| - 1)
$$
其中括号里面的是秩,它等于 $n-1$。为什么秩一定是 $n-1$ 呢?这是之前讲的电路的性质,也就是零空间只有一维。
其实这个性质对所有的图都成立。它就是欧拉公式,太神奇了。注意多面体的欧拉公式和我们图论中的欧拉公式还不一样。
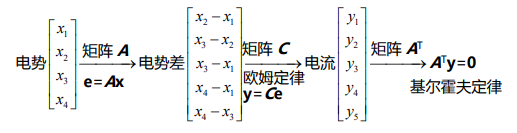
之前讲的是无外部电源的基尔霍夫定律。如果加入外部电源,无非就是变成 $ A^T x = f$,其中 $f$ 是输入的电流。
教授借此介绍应用数学中最基本的方程
$$
A^T C A x = f
$$
留下一个问题下面的矩阵有什么特性?他们都是对称的。
$$
A^T C A
$$
L13 复习
这一章是复习,我没看视频,对着题目做了。
Q1
这一题比较 trivial,就不说了。
Q2
这一题比较 trivial,就不说了。
Q3
如何用行最简阶梯矩阵的性质求出矩阵 A 呢?其实我当时是先看答案得到 A,然后求出 R 再恍然大悟的。这里 tricky 的一点是要列交换。
这里秩为1,自由向量为2。两个通解写成 N 的形式是
$$
\begin{bmatrix}
1&0 \\
1&0 \\
0&1 \\
\end{bmatrix}
$$
这一点不像 $ [-F, I]^T$ 啊。所以我们交换两列,将 I 放到第一个主元的位置就行
$$
\begin{bmatrix}
0&1 \\
0&1 \\
1&0 \\
\end{bmatrix}
$$
然后就可以得到
$$
\begin{bmatrix}
1&0&-1 \\
0&0&0 \\
0&0&0 \\
\end{bmatrix}
$$
看起来不对啊,因为之前我们交换了两个自由列,所以在构造 R 中要再换回去。如下所示,就对了
$$
\begin{equation}
R =
\begin{bmatrix}
1&-1&0 \\
0&0&0 \\
0&0&0 \\
\end{bmatrix}
\end{equation}
$$
判断题时间:
- 如果方阵 A 的零空间中只有零向量,那么它的转置的零空间是什么?
肯定只有零向量,因为 $n=m$,所以 $N(A)=n-r=m-r=N(A^T)$。 - 所有 5x5 可逆方阵是否构成 5x5 矩阵空间的子空间?
取巧的办法就是检查零向量,果然不在里面。 - 如果 $B^2$ 为0,则 $B$ 是否为0?
不。 - 方程组 $Ax=b$ 具有 $n$ 个方程 $n$ 个未知数,若矩阵 $A$ 的列向量线性无关,则 $b$ 取任意向量,方程均有解。
是,有唯一解。
Q4
$$
B = C D =
\\
\begin{equation}
\begin{bmatrix}
1&1&0 \\
0&1&0 \\
1&0&1 \\
\end{bmatrix}
\begin{bmatrix}
1&0&-1&2 \\
0&1&1&-1 \\
0&0&0&0 \\
\end{bmatrix}
\end{equation}
$$
第一小题求 B 零空间的一组基。这里题解说因为 C 可逆,所以 B 的零空间和 D 的零空间相同。这个就很有意思。randomwalk 说,左乘可逆矩阵等于对行向量进行可逆的线性组合。既不改变行空间,又不改变零空间。
第二小题求通解,首先因为向量 b 和矩阵 C 的第一列列向量完全相同,所以问题变为 $ Dx = [1, 0, 0]^T$。这里其实就是矩阵的第四种乘法。
笔记里面的做法是因为之前已经求出 B 的一组基了,所以可以直接用。但我的做法是直接从 b 推导。
$$
DN = b
\\
\begin{equation}
\begin{bmatrix}
1&0&-1&2 \\
0&1&1&-1 \\
0&0&0&0 \\
\end{bmatrix}
N =
\begin{bmatrix}
1 \\
0 \\
0 \\
\end{bmatrix}
\end{equation}
$$
因为 D 已经是行最简阶梯矩阵 R 了。而秩为2,行3列4,显然矩阵不满秩,它的 R 可以表示为
$$
D = R =
\begin{equation}
\begin{bmatrix}
I & F \\
0 & 0 \\
\end{bmatrix}
\end{equation}
$$
容易看出,前两列是 R 的前两列是行空间的基,后两列是自由变量即零空间的基。所以可以得到
$$
\begin{equation}
N =
\begin{bmatrix}
1&-2 \\
-1&1 \\
1&0 \\
0&1 \\
\end{bmatrix}
\end{equation}
$$
解释下,上两行是 -F,下两行是 I。然后再求出一个特解就行。
判断题:
- A 为方阵,则它的行空间和列空间相同?
肯定不是,trivial。 - 如果 A 和 B 的四个子空间相同,则 A 一定是 B 的倍数?
错误,A 和 B 的可以为同阶可逆方阵。 比如 6x6 的矩阵,那么它的行空间和列空间是整个 $R^6$,而两个零空间是0维。但它们不一定相同。 - 开放问题:如果 A 和 B 的是个子空间相同,则有什么性质呢?
- 对上一个问题进一步考虑,如果我们对矩阵 A 中的两行做行交换,四个子空间中不变的是哪些?
是行空间和零空间。这个在 L10 中我们接触过。 - 为什么向量 $v = [1,2,3]^T$ 不可能既在矩阵 A 的零空间中,又成为 A 的一个行向量

